
प्रथम, सिस्टमची रचना
१. हायवे ओव्हरलोड नॉन-स्टॉप डिटेक्शन सिस्टम सामान्यतः फ्रंट-एंड फ्रेट व्हेईकल ओव्हरलोड माहिती संकलन आणि फॉरेन्सिक्स सिस्टम आणि बॅक-एंड फ्रेट व्हेईकल ओव्हरलोड माहिती व्यवस्थापनाने बनलेली असते.
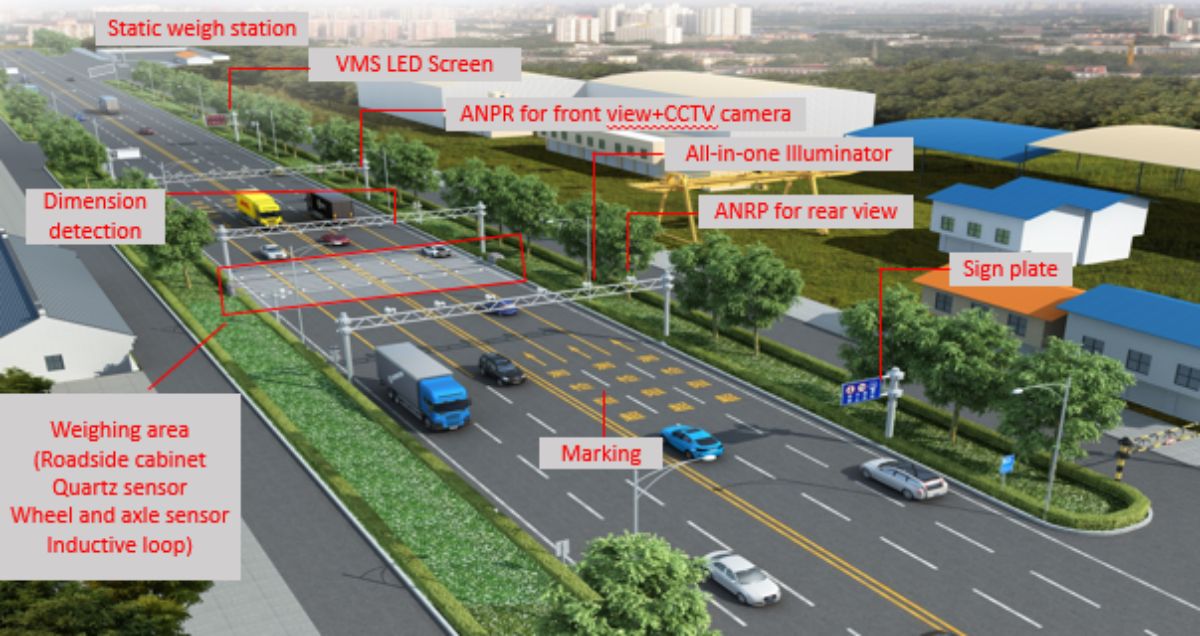
२. फ्रंट-एंड फ्रेट व्हेईकल ओव्हरलोड माहिती संकलन आणि फॉरेन्सिक्स सिस्टम सामान्यतः नॉन-स्टॉप वजन उपकरणे, वाहन प्रोफाइल आकार शोध उपकरणे, परवाना प्लेट ओळख आणि कॅप्चर उपकरणे, वाहन शोधक, व्हिडिओ देखरेख उपकरणे, माहिती प्रकाशन उपकरणे, वाहतूक चिन्हे, वीज पुरवठा आणि वीज संरक्षण सुविधा, साइटवरील नियंत्रण कॅबिनेट, माहिती संकलन आणि प्रक्रिया आणि नेटवर्क ट्रान्समिशन उपकरणे, नॉन-स्टॉप वजन आणि शोध क्षेत्र, वाहतूक चिन्ह चिन्हांकन आणि संबंधित सहाय्यक सुविधांनी बनलेली असते.
३. बॅक-एंड फ्रेट व्हेइकल ओव्हरलोड माहिती व्यवस्थापन (थेट अंमलबजावणीसह) प्लॅटफॉर्म सामान्यतः काउंटी (जिल्हा), नगरपालिका आणि प्रांतीय ओव्हरलोड माहिती व्यवस्थापन (थेट अंमलबजावणीसह) प्लॅटफॉर्मपासून बनलेला असतो.
२. कार्यात्मक आवश्यकता
१. नॉन-स्टॉप वजन उपकरणांसाठी कार्यात्मक आवश्यकता
१.१ ऑपरेटिंग स्पीड रेंज
मालवाहू वाहनांना नॉन-स्टॉप डिटेक्शन क्षेत्रातून जाण्यासाठी नॉन-स्टॉप वजन उपकरणांची वेग श्रेणी (०.५~१००) किमी/तास आहे.
१.२ एकूण वाहन वजनाची अचूकता पातळी
(१) नॉन-स्टॉप वजन उपकरणांच्या परवानगीयोग्य ऑपरेटिंग स्पीड रेंजमधील वाहन आणि मालाच्या एकूण वजनाच्या वजनाची कमाल परवानगीयोग्य त्रुटी JJG 907 "डायनॅमिक हायवे व्हेईकल ऑटोमॅटिक वेइंग अपरेटस व्हेरिफिकेशन रेग्युलेशन्स" (टेबल २-१) मधील अचूकता पातळी ५ आणि १० च्या तरतुदी आणि आवश्यकतांपेक्षा कमी नसावी.
तक्ता २-१ एकूण वाहन वजनाच्या गतिमान वजनाची कमाल स्वीकार्य त्रुटी
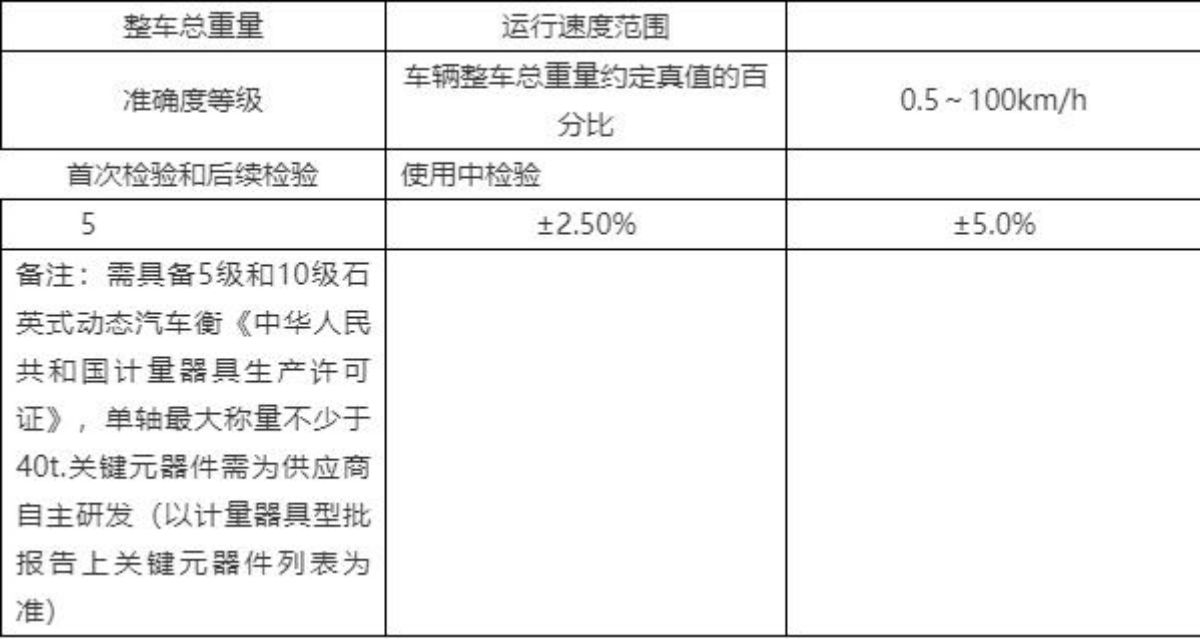
(२) जेव्हा मालवाहू वाहन नॉन-स्टॉप वजन शोध क्षेत्रातून वारंवार प्रवेग आणि मंदावणे, उडी मारणे, थांबणे, एस-बेंड, क्रॉसिंग, प्रेशर लाइन, उलट ड्रायव्हिंग किंवा कमी वेळेत थांबणे आणि जाणे यासारख्या असामान्य ड्रायव्हिंग वर्तनांसह जाते, तेव्हा नॉन-स्टॉप वजन उपकरणाच्या वाहनाच्या एकूण वजनाची अचूकता पातळी तक्ता २-१ मधील तरतुदी आणि आवश्यकतांपेक्षा कमी नसावी. (लेन दाबणे आणि विरुद्ध दिशेने वाहन चालवणे महत्वाचे आहे).
१.३ नॉन-स्टॉप वजन उपकरणांमध्ये वापरलेला लोड सेल GB/T7551 "लोड सेल" च्या तरतुदी आणि आवश्यकतांचे पालन करेल, सेवा आयुष्य ≥ ५० दशलक्ष अक्षांपेक्षा जास्त असेल आणि नॉन-स्टॉप वजन उपकरणांमध्ये वापरल्या जाणाऱ्या लोड सेलची संरक्षण पातळी IP68 पेक्षा कमी नसावी. 。
१.४ नॉन-स्टॉप वजन उपकरणांचा सरासरी त्रासमुक्त कामाचा वेळ ४००० तासांपेक्षा कमी नसावा आणि प्रमुख घटकांचा वॉरंटी कालावधी २ वर्षांपेक्षा कमी नसावा आणि सेवा आयुष्य ५ वर्षांपेक्षा कमी नसावे.
१.५ पॉवर-ऑफ संरक्षण आवश्यकता
(१) वीज बंद असताना, नॉन-स्टॉप वजन उपकरणे सध्या सेट केलेले पॅरामीटर्स आणि वजन माहिती स्वयंचलितपणे संग्रहित करण्यास सक्षम असावीत आणि साठवण वेळ ७२ तासांपेक्षा कमी नसावा.
(२) वीज खंडित झाल्यास, नॉन-स्टॉप वजन उपकरणाचा अंतर्गत घड्याळ चालू वेळ ७२d पेक्षा कमी नसावा.
१.६ गंजरोधक उपचार आवश्यकता
नॉन-स्टॉप वजन उपकरणांच्या उघड्या धातूच्या भागांवर GB/T18226 "हायवे ट्रॅफिक इंजिनिअरिंगमध्ये स्टील घटकांच्या गंजरोधकतेसाठी तांत्रिक अटी" च्या संबंधित तरतुदींनुसार गंजरोधक उपचार केले पाहिजेत.
१.७ नॉन-स्टॉप वजन उपकरणाच्या वाहन डिटेक्टरची गती मापन त्रुटी ≤± 1 किमी/ताशी असावी आणि वाहतूक प्रवाह शोधण्याची अचूकता ≥99% असावी.
१.८ नॉन-स्टॉप वजन उपकरणांसाठी वाहन विभाजकांच्या तांत्रिक आवश्यकता खालीलप्रमाणे आहेत:
(१) अक्षांच्या संख्येची शोध अचूकता ≥९८% असावी.
(२) शाफ्ट स्पेसिंगची डिटेक्शन एरर ≤± १० सेमी असावी.
(३) वाहन वर्गीकरणाची अचूकता ≥ ९५% असावी.
(४) क्रॉस-चॅनेल ओळख दर ≥९८% असावा.
१.९ कार्यरत वातावरणाच्या तापमानाची लागू श्रेणी -२०°C~+८०°C पूर्ण केली पाहिजे आणि पर्यावरणीय आर्द्रता प्रतिरोधनाचे तांत्रिक निर्देशक JT/T817 "हायवे इलेक्ट्रोमेकॅनिकल सिस्टम उपकरणांसाठी सामान्य तांत्रिक आवश्यकता आणि चाचणी पद्धती" च्या बाह्य यांत्रिक आणि विद्युत उपकरणांच्या संबंधित नियम आणि आवश्यकता पूर्ण केले पाहिजेत.
१.१० पावसापासून आणि धूळापासून संरक्षणात्मक उपाययोजना कराव्यात आणि संरक्षण पातळी JT/T817 च्या तरतुदी आणि आवश्यकता पूर्ण करावी.

२. वाहन प्रोफाइल आकार चाचणी उपकरणांसाठी कार्यात्मक आवश्यकता
२.१ जेव्हा मालवाहतूक वाहन (०.५~१००) किमी/तास वेगाने नॉन-स्टॉप वजन शोध क्षेत्रातून जाते, तेव्हा ते मालवाहू वाहनाच्या लांबी, रुंदी आणि उंचीच्या भौमितिक परिमाणांचे आणि ३D मॉडेलचे रिअल-टाइम जलद शोध स्वयंचलितपणे पूर्ण करण्यास सक्षम असावे आणि योग्य ओळख परिणाम आउटपुट करू शकेल. प्रतिसाद वेळ ३० मिलिसेकंदांपेक्षा कमी नसावा आणि एकच शोध आणि आउटपुट परिणाम पूर्ण करण्यासाठी लागणारा वेळ ५ सेकंदांपेक्षा जास्त नसावा.
२.२ मालवाहू वाहनाच्या लांबी, रुंदी आणि उंचीची भौमितिक मापन श्रेणी तक्ता २-२ मधील आवश्यकता पूर्ण करेल.
तक्ता २-२ वाहन प्रोफाइल आकार चाचणी उपकरणांची मापन श्रेणी
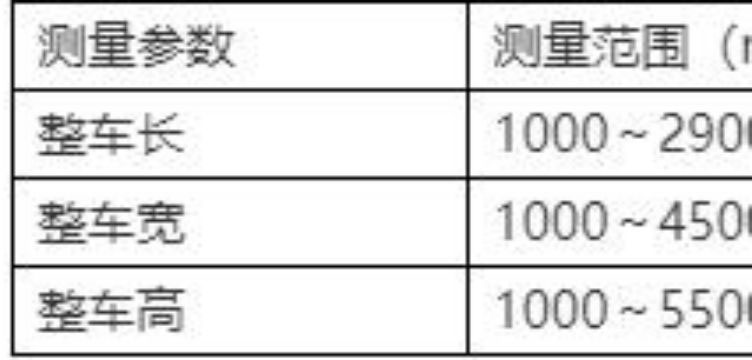
२.३ मालवाहू वाहनाच्या लांबी, रुंदी आणि उंचीचे भौमितिक परिमाण मापन रिझोल्यूशन १ मिमी पेक्षा जास्त नाही आणि वाहन बाह्यरेखा आकार शोध उपकरणाच्या मापन त्रुटीने १~१०० किमी/सामान्य ऑपरेटिंग गतीच्या मर्यादेत खालील आवश्यकता पूर्ण केल्या पाहिजेत: (धावण्याच्या गतीच्या बाबतीत, ते मागील गतिमान वजन उपकरणांच्या आवश्यकतांशी सुसंगत असले पाहिजे).
(१) लांबी त्रुटी≤±५०० मिमी;
(२) रुंदी त्रुटी≤±१०० मिमी;
(३) उंची त्रुटी ≤± ५० मिमी.
२.४ वाहन प्रोफाइल आकार चाचणी उपकरणांच्या लेसर स्पॉट डिटेक्शनची वारंवारता ≥1kHz असावी आणि त्यात मोटार वाहन GB1589 "ऑटोमोबाईल्स, ट्रेलर्स आणि ऑटोमोबाईल ट्रेन्सची बाह्यरेखा आकार, एक्सल लोड आणि गुणवत्ता मर्यादा" मध्ये निर्दिष्ट केलेल्या 9 प्रकारच्या वाहन मॉडेल्स आणि वाहन गती शोध कार्ये असावीत.
२.५ त्यात समांतर मालवाहतूक वाहने, एस-बेंड ड्रायव्हिंग स्टेट जजमेंट, ब्लॅक मटेरियल शील्डिंग आणि उच्च परावर्तकता मटेरियल कार्गो व्हेइकल प्रोफाइल भौमितिक आकार शोधण्याची कार्ये असावीत.
२.६ मध्ये मालवाहतूक मोटार वाहन मॉडेल्स, रहदारीचे प्रमाण, स्थानाचा वेग, समोरील वेळेचे अंतर, कारच्या टक्केवारीनंतर, समोरील अंतर, वेळेचा व्याप शोधण्याचे कार्य यांचे वर्गीकरण असावे. आणि मालवाहतूक मोटार वाहन मॉडेल्सची वर्गीकरण अचूकता ≥ ९५% असावी.
२.७ कार्यरत वातावरणाच्या तापमानाची लागू श्रेणी -२० °C ~ +५५ °C पूर्ण केली पाहिजे आणि पर्यावरणीय आर्द्रता प्रतिरोधनाचे तांत्रिक निर्देशक JT/T817 "हायवे इलेक्ट्रोमेकॅनिकल सिस्टम उपकरणांसाठी सामान्य तांत्रिक आवश्यकता आणि चाचणी पद्धती" च्या बाह्य यांत्रिक आणि विद्युत उपकरणांच्या संबंधित नियम आणि आवश्यकता पूर्ण केले पाहिजेत.
२.८ लेसर वाहन प्रोफाइल आकार चाचणी उपकरणे देखभाल चॅनेलसह गॅन्ट्रीसह स्थापित करावीत.
२.९ वाहन प्रोफाइल आकार चाचणी उपकरणांची संरक्षण पातळी IP67 पेक्षा कमी नसावी.
३. लायसन्स प्लेट ओळख आणि कॅप्चर उपकरणांसाठी कार्यात्मक आवश्यकता
३.१ लायसन्स प्लेट ओळख आणि कॅप्चर उपकरणांच्या कार्यात्मक आवश्यकता GB/T 28649 "मोटार वाहन नंबर प्लेट्ससाठी स्वयंचलित ओळख प्रणाली" च्या संबंधित तरतुदी आणि आवश्यकता पूर्ण करतील.
३.२ लायसन्स प्लेट ओळख आणि कॅप्चर उपकरणे फिल लाइट किंवा फ्लॅशिंग लाइटने सुसज्ज असावीत, जी कोणत्याही हवामान परिस्थितीत नॉन-स्टॉप वजन शोध क्षेत्रातून जाणारा वाहन क्रमांक स्पष्टपणे कॅप्चर करू शकेल आणि योग्य ओळख परिणाम आउटपुट करू शकेल.
३.३ लायसन्स प्लेट ओळख आणि कॅप्चर उपकरणे दिवसा लायसन्स प्लेट ओळख अचूकतेच्या ≥ ९९% आणि रात्री लायसन्स प्लेट ओळख अचूकतेच्या ≥९५% असावीत आणि ओळख वेळ ३०० मिलिसेकंदांपेक्षा जास्त नसावा.
३.४ गोळा केलेल्या मालवाहू वाहनाच्या नंबर प्लेटची प्रतिमा पूर्ण-रुंदीच्या JPG स्वरूपात स्पष्टपणे आउटपुट असावी आणि ओळख निकालात ओळख वेळ, परवाना प्लेटचा रंग इत्यादींचा समावेश असावा.
३.५ लायसन्स प्लेट रेकग्निशन कॅप्चर इमेज पिक्सेल ५ दशलक्ष पेक्षा कमी नसावेत, इतर कॅप्चर इमेज पिक्सेल ३ दशलक्ष पेक्षा कमी नसावेत, मालवाहू वाहने नॉन-स्टॉप वजन शोध क्षेत्रातून जाताना, वाहनाचा पुढचा भाग, वाहनाच्या दोन्ही बाजू आणि वाहनाच्या मागील बाजूने एकूण ४ पेक्षा कमी हाय-डेफिनिशन इमेज कॅप्चर करावीत.
३.६ समोरील हाय-डेफिनिशन इमेज माहितीनुसार, मालवाहतूक वाहन परवाना प्लेट क्षेत्र, पुढचा आणि कॅबची वैशिष्ट्ये, पुढचा रंग इत्यादी, वाहनाच्या बाजूला असलेल्या हाय-डेफिनिशन इमेज माहितीनुसार, एक्सलची संख्या, शरीराचा रंग आणि वाहतूक केलेल्या वस्तूंची मूलभूत परिस्थिती स्पष्टपणे ओळखण्यास सक्षम असावे; वाहनाच्या मागील बाजूच्या हाय-डेफिनिशन इमेज माहितीनुसार, टेल लायसन्स प्लेट क्रमांक, शरीराचा रंग आणि इतर माहिती ओळखता येते.
३.७ प्रत्येक प्रतिमेवर शोध तारीख, चाचणी वेळ, चाचणी स्थान, वाहन आणि मालाचे एकूण वजन, वाहनाचे परिमाण, प्रतिमा फॉरेन्सिक उपकरण क्रमांक, बनावटी विरोधी आणि इतर माहिती यासारख्या माहितीचा समावेश असावा.
३.८ कॅप्चर केलेल्या इमेज इन्फॉर्मेशन ट्रान्समिशन चॅनेलची बँडविड्थ १० एमबीपीएस पेक्षा कमी नसावी.
३.९ त्यात असामान्य संप्रेषण आणि वीज खंडित होणे यासारखे दोष स्वयं-तपासणी कार्ये असावीत.
३.१० कार्यरत वातावरणाच्या तापमानाची लागू श्रेणी -२० °C ~ +५५ °C पूर्ण केली पाहिजे आणि पर्यावरणीय आर्द्रता प्रतिरोधनाचे तांत्रिक निर्देशक JT/T817 "हायवे इलेक्ट्रोमेकॅनिकल सिस्टम उपकरणांसाठी सामान्य तांत्रिक आवश्यकता आणि चाचणी पद्धती" च्या बाह्य यांत्रिक आणि विद्युत उपकरणांच्या संबंधित नियम आणि आवश्यकता पूर्ण केले पाहिजेत.
३.११ लायसन्स प्लेट ओळख आणि कॅप्चर उपकरणांची संरक्षण पातळी IP67 पेक्षा कमी नसावी.
४ व्हिडिओ पाळत ठेवणे उपकरणांच्या कार्यात्मक आवश्यकता
४.१ व्हिडिओ पाळत ठेवणाऱ्या कॅमेऱ्यामध्ये दिवसा आणि रात्री इन्फ्रारेड कॅमेरा फंक्शन असावे आणि तो ऑल-राउंड कॅमेरा फंक्शनच्या वजन शोधण्याच्या क्षेत्राचे नॉन-स्टॉप वजन करण्यास सक्षम असावा आणि बेकायदेशीर मालवाहू वाहनांच्या ओव्हरलोड पुराव्याच्या संकलनाचा व्हिडिओ डेटा किमान १० सेकंद वाचवू शकेल.
४.२ त्यात स्व-निदान, दृश्य क्षेत्र कॅलिब्रेशन आणि स्वयंचलित भरपाईची कार्ये असावीत.
४.३ फॉरेन्सिक व्हिडिओ प्रतिमा ३ दशलक्ष पिक्सेलपेक्षा कमी नसाव्यात आणि त्या स्पष्ट आणि स्थिर असाव्यात.
४.४ त्यात रोटेशन आणि झूमचे कार्य असले पाहिजे आणि क्षैतिज आणि उभे रोटेशन आणि लेन्स झूम नियंत्रण आदेशानुसार करता येतात.
४.५ त्यात पाऊस आणि दंव धुक्याचे दिवे स्वच्छ करणे आणि काढून टाकणे हे कार्य असले पाहिजे आणि ते वेळेत संरक्षक आवरण स्वच्छ, गरम आणि डीफ्रॉस्ट करण्यास सक्षम असले पाहिजे.
४.६ फॉरेन्सिक व्हिडिओ प्रतिमा रिअल टाइममध्ये काउंटी (शहर) पातळीवरील ओव्हरलोड माहिती व्यवस्थापन आणि थेट अंमलबजावणी प्लॅटफॉर्मवर प्रसारित केल्या पाहिजेत.
४.७ व्हिडिओ पाळत ठेवणारी उपकरणे आणि त्यांच्या अॅक्सेसरीजचे इतर तांत्रिक निर्देशक GA/T995 च्या संबंधित तरतुदी आणि आवश्यकता पूर्ण करतील.
४.८ कार्यरत वातावरणाच्या तापमानाची लागू श्रेणी -२०°C~+५५°C पूर्ण करावी आणि पर्यावरणीय आर्द्रता प्रतिरोधकतेचे तांत्रिक निर्देशक JT/T817 "हायवे इलेक्ट्रोमेकॅनिकल सिस्टम उपकरणांसाठी सामान्य तांत्रिक आवश्यकता आणि चाचणी पद्धती" च्या बाह्य यांत्रिक आणि विद्युत उपकरणांच्या संबंधित नियम आणि आवश्यकता पूर्ण करावेत.
माहिती प्रकाशन उपकरणांसाठी ५ कार्यात्मक आवश्यकता
५.१ ते ओव्हरलोड बेकायदेशीर वाहनाच्या चालकाला वाहनाच्या ओव्हरलोडबद्दल रिअल-टाइम माहिती देण्यास सक्षम असावे.
५.२ ते मजकूर बदलणे आणि स्क्रोलिंग यासारखी माहिती प्रकाशित आणि प्रदर्शित करण्यास सक्षम असावे.
५.३ हायवे एलईडी व्हेरिएबल इन्फॉर्मेशन साइन्सचे मुख्य कार्यात्मक निर्देशक आणि तांत्रिक निर्देशक GB/T23828 "हायवे एलईडी व्हेरिएबल इन्फॉर्मेशन साइन्स" च्या संबंधित तरतुदी आणि आवश्यकता पूर्ण करतील.
५.४ डबल-कॉलम गॅन्ट्री प्रकार हायवे एलईडी व्हेरिएबल इन्फॉर्मेशन साइन डिस्प्ले स्क्रीन सामान्यतः वापरल्या जाणाऱ्या पिक्सेल स्पेसिंगसाठी निवडता येते: १० मिमी, १६ मिमी आणि २५ मिमी. चार लेन आणि सहा लेनचा डिस्प्ले एरिया आकार अनुक्रमे १० चौरस मीटर आणि १४ चौरस मीटर असू शकतो. डिस्प्ले कंटेंट फॉरमॅट १ पंक्ती आणि १४ स्तंभ असू शकतो.
५.५ सिंगल-कॉलम हायवे एलईडी व्हेरिएबल इन्फॉर्मेशन साइन डिस्प्लेचे पिक्सेल स्पेसिंग निवडता येते: १० मिमी, १६ मिमी आणि २५ मिमी. डिस्प्ले स्क्रीनचा आकार ६ चौरस मीटर आणि ११ चौरस मीटरमधून निवडता येतो. डिस्प्ले कंटेंट फॉरमॅट ४ ओळी आणि ९ स्तंभ असू शकतो.
५.६ हायवे एलईडी व्हेरिएबल इन्फॉर्मेशन साइन्सची रचना आणि सेटिंग आणि व्हिज्युअल रेकग्निशन अंतर हे रोड सेक्शनमधील मालवाहू वाहनांच्या प्रत्यक्ष वेग आणि व्हिज्युअल रेकग्निशन गरजांचा पूर्णपणे विचारात घेतले पाहिजे आणि GB/T23828 "हायवे एलईडी व्हेरिएबल इन्फॉर्मेशन साइन्स" च्या संबंधित तरतुदी आणि आवश्यकता पूर्ण करतात.
६ वाहतूक चिन्ह सेटिंग आवश्यकता
६.१ नॉन-स्टॉप वजन शोध क्षेत्रासमोर २०० मीटरपेक्षा कमी अंतरावर "नॉन-स्टॉप वजन आणि शोध क्षेत्र" मध्ये प्रवेश करण्यासाठी वाहतूक चिन्ह स्थापित करा.
६.२ नॉन-स्टॉप वजन शोध क्षेत्रासमोर किमान १५० मीटर अंतरावर "लेन बदलण्यास मनाई" असे वाहतूक चिन्ह लावा.
६.३ नॉन-स्टॉप वजन शोधण्याच्या क्षेत्राच्या मागे कमीत कमी २०० मीटर अंतरावर "लेन बदलण्यास मनाई उठवा" असे वाहतूक चिन्ह लावा.
६.४ नॉन-स्टॉप वजन शोधण्याच्या क्षेत्रात वाहतूक चिन्हे बसवणे GB5768 "रोड वाहतूक चिन्हे आणि खुणा" च्या डिझाइन आणि आवश्यकतांचे पालन करेल.
७. वीज पुरवठा उपकरणे आणि वीज संरक्षण ग्राउंडिंगसाठी आवश्यकता
७.१ ओव्हरलोड माहिती संकलन आणि न्यायवैद्यक प्रणाली स्थिर आणि विश्वासार्ह वीज पुरवठा लाईन्सने सुसज्ज असेल, जी २४ तास अखंडित वीज पुरवठा ऑपरेशनच्या आवश्यकता पूर्ण करण्यास सक्षम असेल.
७.२ ओव्हरलोड माहिती संकलन आणि फॉरेन्सिक्स सिस्टम आणि संबंधित घटकांच्या पॉवर सप्लाय इंटरफेस आणि नियंत्रण इंटरफेससाठी आवश्यक वीज आणि ओव्हरव्होल्टेज संरक्षण उपाय केले जातील आणि संरक्षणात्मक उपाय JT/T817 "हायवे इलेक्ट्रोमेकॅनिकल सिस्टम उपकरणांसाठी सामान्य तांत्रिक आवश्यकता आणि चाचणी पद्धती" च्या संबंधित तरतुदी आणि आवश्यकतांचे पालन करतील.
७.३ ओव्हरलोड माहिती संकलन आणि फॉरेन्सिक्स प्रणालीने सिंगल-पॉइंट जवळील ग्राउंडिंग पद्धत स्वीकारली पाहिजे आणि डीसी समांतर ग्राउंडिंग पद्धत स्वीकारली पाहिजे.
७.४ ओव्हरलोड माहिती संकलन आणि न्यायवैद्यकीय उपकरणांचे वीज संरक्षण आणि विद्युत प्रतिकार ≤ १० Ω असेल आणि संरक्षणात्मक ग्राउंडिंग प्रतिकार ≤ ४ Ω असेल.
८ फील्ड कंट्रोल कॅबिनेटच्या कार्यात्मक आवश्यकता

८.१ ओव्हरलोड माहिती संकलन आणि फॉरेन्सिक्स प्रणालीसह कॉन्फिगर केलेले ऑन-साइट कंट्रोल कॅबिनेट डेटा अधिग्रहण प्रोसेसर, वाहन शोधक, नेटवर्क स्विच आणि इतर उपकरणे साठवण्यास सक्षम असावे. ते ट्रक ओव्हरलोड माहिती प्रांतीय वाहतूक माहिती केंद्र वाहतूक व्यापक प्रशासकीय थेट अंमलबजावणी प्लॅटफॉर्मवर अपलोड करण्यास सक्षम असावे आणि ट्रक ओव्हरलोड माहिती हायवे एलईडी व्हेरिएबल माहिती साइन इन रिलीज आणि डिस्प्लेसाठी रिअल टाइममध्ये प्रसारित करण्यास सक्षम असावे.
८.२ कंट्रोल कॅबिनेटची रचना दुहेरी-स्तरीय चेसिस सीलने केली पाहिजे, जी धूळ आणि पाऊस प्रभावीपणे रोखू शकेल आणि त्यात स्वतंत्र तापमान नियंत्रण प्रणाली असेल.
८.३ नियंत्रण कॅबिनेटची रचना स्लॉटसह केली पाहिजे जेणेकरून कार्य विस्तार सुलभ होईल.
८.४ मर्यादा ओलांडलेल्या शोध डेटाची गळती टाळण्यासाठी नियंत्रण कॅबिनेट डेटा सुरक्षा संरक्षण उपकरणांनी सुसज्ज असले पाहिजे.
९. महामार्गावरील ओव्हरलोडसाठी नॉन-स्टॉप वजन क्षेत्रे स्थापित करण्यासाठी आवश्यकता
९.१ नॉन-स्टॉप वजन शोधण्याचे क्षेत्र नॉन-स्टॉप वजन उपकरण वाहक (क्वार्ट्ज क्रिस्टल सेन्सर) आणि त्याच्या पुढच्या आणि मागच्या टोकांवर मार्गदर्शक विभागांनी बनलेले आहे (समोर ३० मीटर आणि मागे १५ मीटरच्या कडक रस्त्याच्या पृष्ठभागानुसार) (आकृती २-१).

आकृती २-१ नॉन-स्टॉप वजन क्षेत्राचे योजनाबद्ध आकृती
९.२ नॉन-स्टॉप वजन आणि चाचणी क्षेत्राचे स्थान सपाट नसावे, रेखांशाच्या वक्रतेची त्रिज्या लहान असेल, दृश्य अंतर कमी असेल आणि उतार आणि इतर रस्त्यांचे भाग लांब असतील आणि रेषीय निर्देशकांनी ASTM E1318 "वापरकर्त्याच्या आवश्यकता आणि चाचणीसह महामार्ग वजन-इन-मोशन (WIM) प्रणालींसाठी मानक तपशील" पूर्ण केले पाहिजेत. पद्धती, विशिष्ट आवश्यकता खालीलप्रमाणे आहेत:
(१) नॉन-स्टॉप वजन शोधण्याच्या क्षेत्रात ६० मीटर मार्गदर्शक विभागाच्या रस्त्याच्या मध्यरेषेचा आणि मागील ३० मीटर मार्गदर्शक रस्ता विभागाचा वळण त्रिज्या ≥ १.७ किमी असावा.
(२) नॉन-स्टॉप वजन शोधण्याच्या क्षेत्रात समोरील ६० मीटर मार्गदर्शक विभागात आणि मागील ३० मीटर मार्गदर्शक रस्त्याच्या विभागात रस्त्याच्या पृष्ठभागाचा रेखांशाचा उतार ≤२% असावा.
(३) नॉन-स्टॉप वजन शोधण्याच्या क्षेत्राच्या पुढील ६० मीटर मार्गदर्शक रस्ता विभागाच्या आणि मागील ३० मीटर मार्गदर्शक रस्ता विभागाच्या फुटपाथ ट्रान्सव्हर्स उतार मूल्य i 1% ≤ i ≤2% पर्यंत पोहोचले पाहिजे.
(४) १५० मीटर मार्गदर्शक रस्त्याच्या विभागात नॉन-स्टॉप वजन शोध क्षेत्रासमोर चालकाच्या दृष्टीक्षेपात अडथळा आणणारे कोणतेही अडथळे नसावेत.
(५) त्याच रस्त्याच्या विभागात नॉन-स्टॉप वजन आणि शोध क्षेत्राचे स्थान आणि महामार्ग बोगद्याच्या प्रवेश आणि निर्गमन दरम्यानचे अंतर २ किमी पेक्षा कमी आणि १ किमी पेक्षा कमी नसावे.
(६) सेन्सर आणि रस्त्याच्या पृष्ठभागाच्या कनेक्शनची क्षैतिज त्रुटी ०.१ मिमी पेक्षा जास्त नाही.
९.३ नॉन-स्टॉप वजन डेटाची अचूकता आणि ड्रायव्हिंग सुरक्षितता सुनिश्चित करण्यासाठी, नॉन-स्टॉप वजन शोध क्षेत्राच्या पुढील ६० मीटर मार्गदर्शक रस्ता विभागाचे आणि मागील ३० मीटर मार्गदर्शक रस्ता विभागाचे रोड लेन आयसोलेशन सॉलिड रेषेने वेगळे केले पाहिजे.
९.४ रस्त्यांच्या बांधकामाचे मार्गदर्शन करण्यासाठी नॉन-स्टॉप वजन आणि चाचणी क्षेत्र
(१) मार्गदर्शक रस्त्याच्या भागाचा रस्त्याचा थर स्थिर असावा आणि फुटपाथचा घर्षण गुणांक रस्त्याच्या भागाच्या डिझाइन आवश्यकता पूर्ण करणारा असावा.
(२) मार्गदर्शक रस्त्याच्या भागाचा फुटपाथ पृष्ठभाग गुळगुळीत आणि कॉम्पॅक्ट असावा आणि डांबरी फुटपाथमध्ये खड्डे, खड्डे, भूस्खलन, गर्दी, भेगा, नेटवर्क क्रॅक आणि फुगे नसावेत आणि सिमेंट फुटपाथमध्ये अडखळलेले, तुटलेले प्लेट्स, भूस्खलन, चिखल साचणे आणि इतर रोग नसावेत. सिमेंट काँक्रीट फुटपाथ आणि डांबरी काँक्रीट फुटपाथची सपाटता JTGF80-1 "हायवे अभियांत्रिकी गुणवत्ता तपासणी आणि मूल्यांकन मानके" च्या संबंधित तरतुदी आणि आवश्यकता पूर्ण करेल.
(३) मार्गदर्शक रस्त्याच्या भागाच्या रस्त्याच्या पृष्ठभागाची रुंदी वजनाच्या मर्यादेतील सर्वात रुंद मालवाहू वाहनाच्या सामान्य मार्गाला आधार देण्यास सक्षम असावी.
(४) नॉन-स्टॉप वजन आणि चाचणी क्षेत्रातील फुटपाथची मध्य रेषा दुहेरी पिवळ्या (एकच पिवळ्या) घन रेषांनी वेगळी करावी आणि लेन सीमांकन रेषा पांढऱ्या घन रेषांनी वेगळी करावी.
३. इंटरफेस प्रोटोकॉल आणि डेटा फॉरमॅट आवश्यकता
हायवे ओव्हरलोड नॉन-स्टॉप डिटेक्शन सिस्टमचा इंटरफेस प्रोटोकॉल आणि डेटा फॉरमॅट "फुजियान ट्रॅफिक कॉम्प्रिहेन्सिव्ह अॅडमिनिस्ट्रेटिव्ह डायरेक्ट एन्फोर्समेंट इंजिनिअरिंग डिझाइन प्लॅन" च्या संबंधित तरतुदी आणि आवश्यकता पूर्ण करेल जेणेकरून काउंटी (जिल्हा), नगरपालिका आणि प्रांतीय ओव्हरलोड माहिती व्यवस्थापन (डायरेक्ट इन्फोर्समेंटसह) प्लॅटफॉर्म दरम्यान परस्परसंबंध आणि माहितीची देवाणघेवाण सुनिश्चित होईल.

एन्विको टेक्नॉलॉजी कं, लिमिटेड
E-mail: info@enviko-tech.com
https://www.envikotech.com
चेंगडू कार्यालय: क्रमांक २००४, युनिट १, इमारत २, क्रमांक १५८, तियानफू चौथी स्ट्रीट, हाय-टेक झोन, चेंगडू
हाँगकाँग कार्यालय: ८एफ, चेउंग वांग बिल्डिंग, २५१ सॅन वुई स्ट्रीट, हाँगकाँग
कारखाना: इमारत ३६, जिंजियालिन औद्योगिक क्षेत्र, मियांयांग शहर, सिचुआन प्रांत
पोस्ट वेळ: जानेवारी-२५-२०२४




